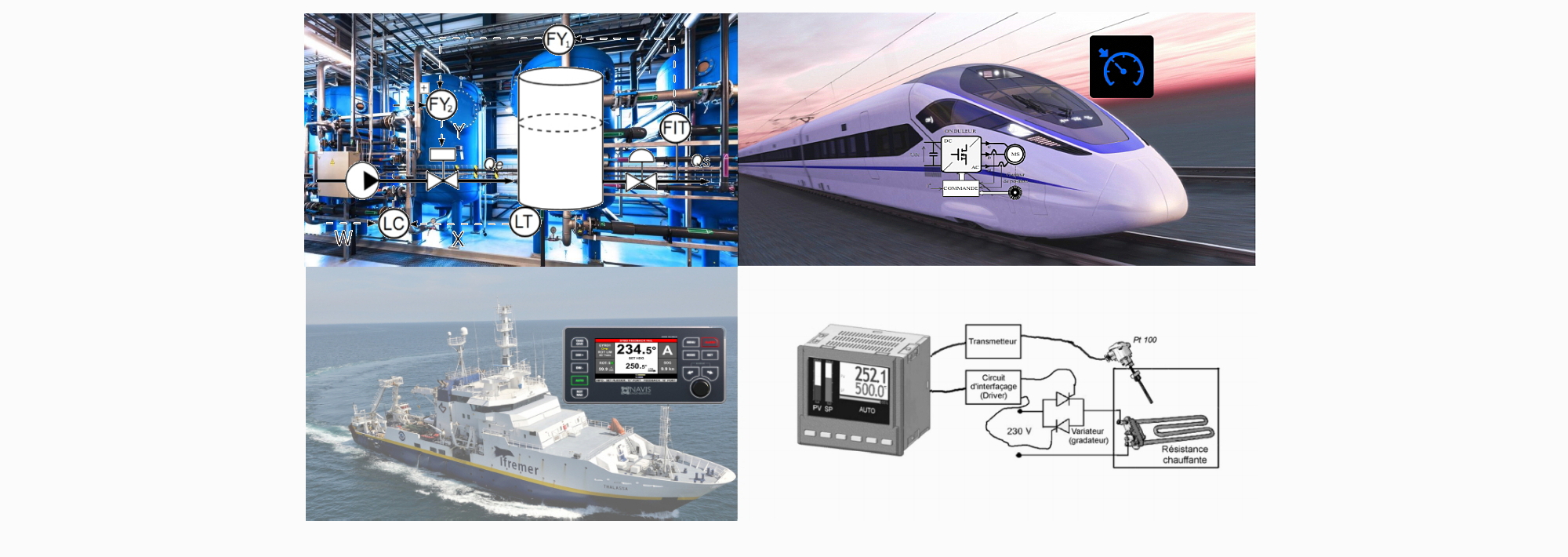
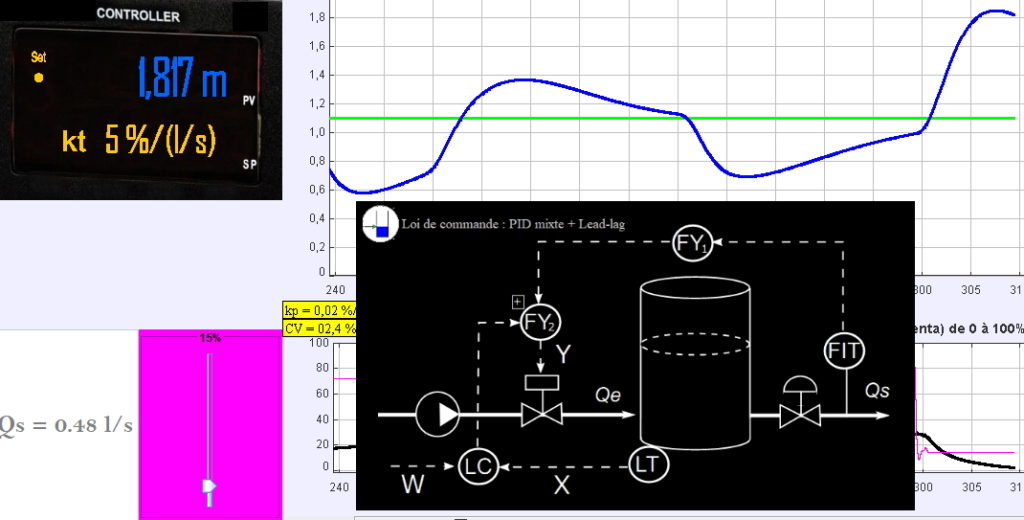
Le niveau d’une cuve est contrôlé par une vanne pilotée par une loi de commande PID. Afin d’améliorer les performances dynamiques on y ajoute une action de tendance (feedforward) utilisant une loi de commande lead-lag à régler.
Le cahier des charges et la correction de chaque exercice sont disponibles dans l’ouvrage “Découverte et pratique de l’automatique”, Ed. Ellipses, Coll. Technosup.
Télécharger l’exercice Niveau_LL : ![]()
Il s’exécute avec une plateforme Java, disponible ici  ou là
ou là 